Counting the Miles That Matter: A Rigorous Data Audit of Tesla's FSD and Cybercab Ambitions

Numbers do not lie, but they do hide. Tesla has reported that its global fleet has collectively logged over six billion miles under Full Self-Driving supervision, a figure Elon Musk deploys with the cadence of a mantra. Six billion sounds overwhelming, almost cosmically sufficient. Yet when automotive safety researchers apply the standard benchmark for statistical confidence in autonomous driving validation, roughly 275 million miles per edge-case scenario at minimum, the picture sharpens into something far more demanding. A fleet does not simply accumulate miles; it accumulates the right miles, in the right conditions, captured with the right fidelity. The real question for Tesla's robotaxi ambitions is not how many miles exist, but what those miles are actually teaching the system.
The Intervention Rate Problem: Parsing Tesla's Safety Reports
California's Department of Motor Vehicles requires manufacturers testing autonomous vehicles on public roads to disclose disengagement reports, the instances where a human driver must reassume control. Tesla's FSD, operating under a supervised framework, does not fall under the same mandatory disclosure regime as fully driverless competitors, which creates a methodological gap that analysts have been trying to bridge for years. Third-party testers and independent researchers have attempted to fill that void. Data aggregated from thousands of user-reported FSD interventions on forums and structured reporting platforms suggests a current intervention rate in the range of one event per 50 to 200 miles in complex urban environments, with highway performance considerably cleaner, estimated at one intervention per 400 to 800 miles. These figures are self-reported and carry inherent selection bias, but they represent the most granular public data available outside Tesla's internal telemetry.
For context, Waymo's publicly disclosed disengagement data from California operations showed rates well below one per thousand miles in comparable geographies before the company moved operations to a commercial framework and stopped releasing the metric entirely. The comparison is imperfect, since the two systems operate under fundamentally different supervision philosophies, but it frames the gap Tesla must close before Cybercab can operate without a human safety net.
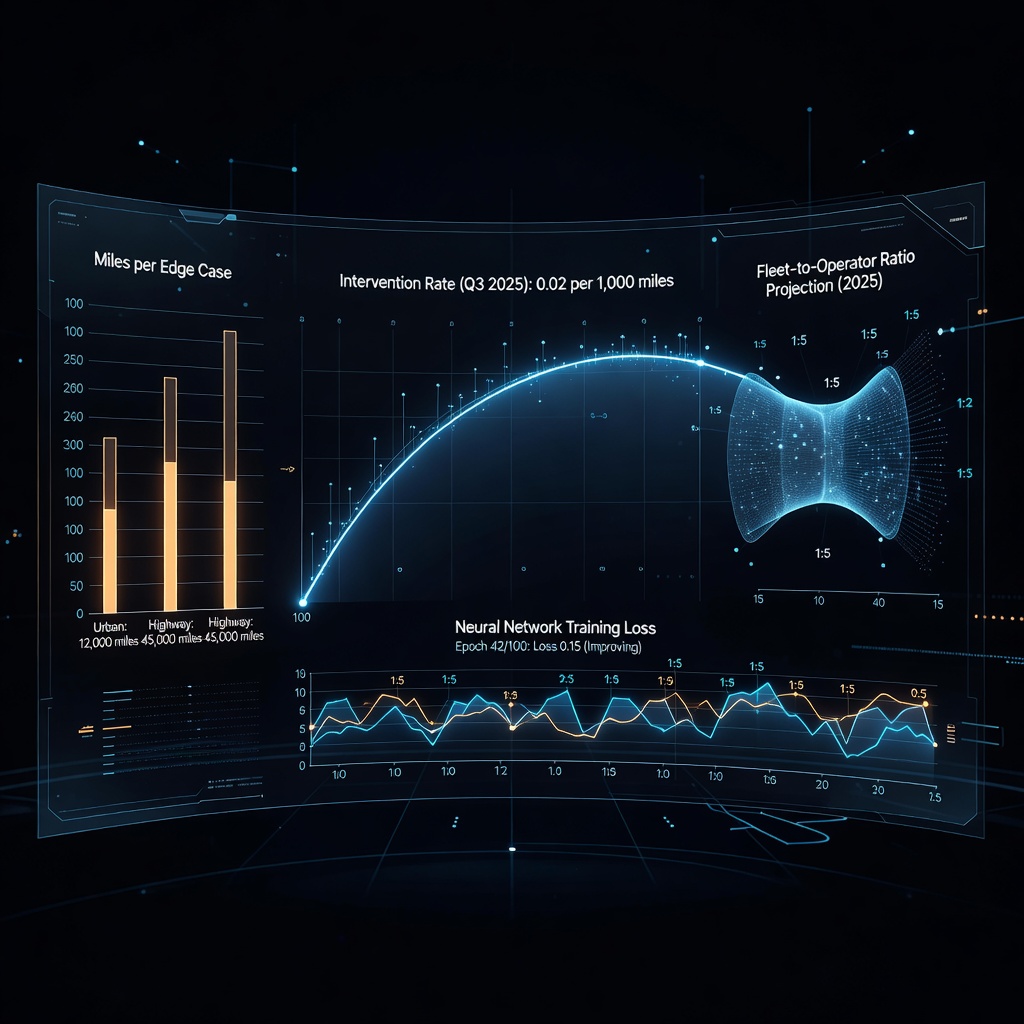
The Cybercab Unit Economics: Running the Actual Numbers
Musk has projected a Cybercab operating cost of approximately 20 cents per mile, a figure that would radically undercut both human-driven rideshare (where driver pay alone typically accounts for 60 to 70 cents per mile of passenger revenue) and existing robotaxi competitors. Decomposing that 20-cent target reveals where the assumptions live. Battery depreciation on a 100 kWh pack cycling daily at commercial utilization rates, roughly 150 to 200 miles per day, runs approximately 4 to 6 cents per mile using standard lithium-ion degradation curves. Electricity at the U.S. commercial average of around 12 cents per kilowatt-hour adds another 3 to 4 cents per mile for a vehicle achieving 3 miles per kWh. Insurance, maintenance, and connectivity overhead conservatively add 5 to 7 cents. That leaves roughly 3 to 8 cents for fleet management, software overhead, and margin, a razor-thin buffer that depends entirely on near-zero human labor cost and a vehicle that essentially never requires intervention.
The math is not impossible, but it is unforgiving. A single 30-minute remote-assist call from a human operator, at a loaded labor cost of around 25 dollars per hour, costs more than a full 10-mile trip generates in revenue at a 20-cent-per-mile rate. This is why Tesla's vision for Cybercab depends less on the vehicle itself and more on the FSD software achieving a reliability threshold where human remote operators manage fleets of hundreds of vehicles simultaneously rather than monitoring individual cars. That ratio, often called the fleet-to-operator ratio, becomes the single most important operational benchmark. Waymo currently operates with estimated fleet-to-operator ratios in the low tens. Tesla's business model requires ratios in the hundreds to thousands.
Neural Network Training: The Dojo Variable
Tesla's proprietary Dojo supercomputer, designed to process the video data streaming from the fleet's eight cameras at scale, is the infrastructure bet underpinning FSD's improvement trajectory. At its announced peak configuration, Dojo was targeting over an exaflop of AI training compute, placing it in the global top tier of purpose-built training clusters. The empirical question is whether raw compute translates linearly into driving capability. Research from academic autonomous systems groups suggests the relationship is logarithmic rather than linear: doubling compute produces meaningful but diminishing gains in edge-case handling, particularly for what engineers call long-tail scenarios, the bizarre, low-probability events that account for a disproportionate share of real-world accidents.
Tesla's data advantage is genuine. No other consumer vehicle manufacturer has embedded a data collection pipeline of comparable scale into the hands of paying customers. The fleet effectively runs a continuous, distributed experiment across every road condition, weather pattern, and traffic geometry on earth. The methodological challenge is that not all of this data arrives with ground-truth labels. Supervised learning requires knowing the correct answer; Tesla's approach relies heavily on pseudo-labeling, using the model's own high-confidence predictions to generate training signal. This creates an epistemological loop that works brilliantly for common scenarios and can quietly calcify errors in rare ones.

Deployment Timeline Archaeology: What the Dates Actually Reveal
Tesla launched a supervised Cybercab pilot in Austin, Texas in June 2025, with a small initial fleet operating under constrained geographic conditions. The choice of Austin is itself data-rich: the city features a mix of grid-based downtown streets, high-speed arterials, and suburban sprawl, representing a moderate rather than maximum complexity environment. Notably, Tesla did not choose San Francisco, Manhattan, or a densely international city for launch, a decision that reflects operational pragmatism rather than timidity. Geofenced initial deployment allows the system to accumulate high-density miles in a bounded environment before confronting the combinatorial complexity of truly open-domain operation.
Historical benchmarking against other AV deployments suggests this approach is standard and sensible. Waymo's commercial Phoenix launch in 2020 began within a 50-square-mile operational design domain. Cruise's San Francisco operation expanded incrementally over multiple years. The distinguishing variable for Tesla is speed of hardware iteration: Cybercab is purpose-built without a steering wheel or pedals, meaning regulatory approval for any expanded domain requires demonstrated fully driverless reliability, not merely supervised competence. That structural constraint makes the Austin data especially consequential. Every mile logged there is simultaneously a product service and a regulatory argument.
The Benchmark That Will Define Everything
Within the autonomous vehicle research community, there is growing consensus around a specific reliability threshold for commercial driverless operation: a critical intervention rate below one per million miles, sustained across diverse conditions for a statistically significant sample. At Tesla's current fleet size and utilization, reaching that empirical benchmark with Cybercab could theoretically be accomplished faster than any predecessor, provided the FSD architecture scales as the training data suggests it should. The words theoretically and suggests are doing enormous work in that sentence.
What Tesla has built is a system with genuinely unprecedented data infrastructure, a plausible unit economics model, and a hardware platform designed from first principles for autonomous operation. What remains unresolved is whether the neural architecture underlying FSD can achieve the reliability gradient required for unsupervised commercial deployment, and whether regulators will accept the statistical arguments Tesla presents as sufficient evidence before a competitor either matches the data advantage or finds an architectural shortcut Tesla missed. The six billion miles are real. The question the data is still answering is whether they add up to the right six billion.
"The fleet-to-operator ratio will define robotaxi profitability more than any other single variable. Tesla's model only closes at ratios the industry has never demonstrated at scale."
For the engineers, investors, and regulators watching Austin's constrained pilot accumulate its first commercial miles, the scoreboard is not measuring rides completed or revenue generated. It is measuring a probability distribution inching toward a threshold that, once crossed, will be the most consequential benchmark in the history of personal transportation.
Alex Rivera
Tech journalist covering Elon Musk’s companies for over 8 years.